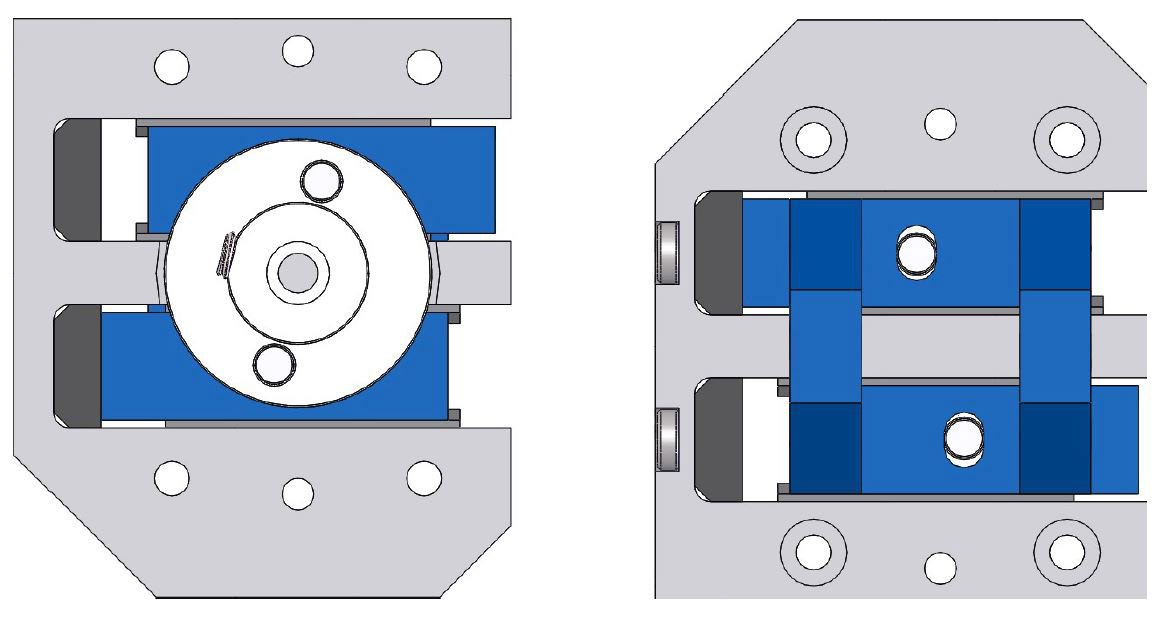
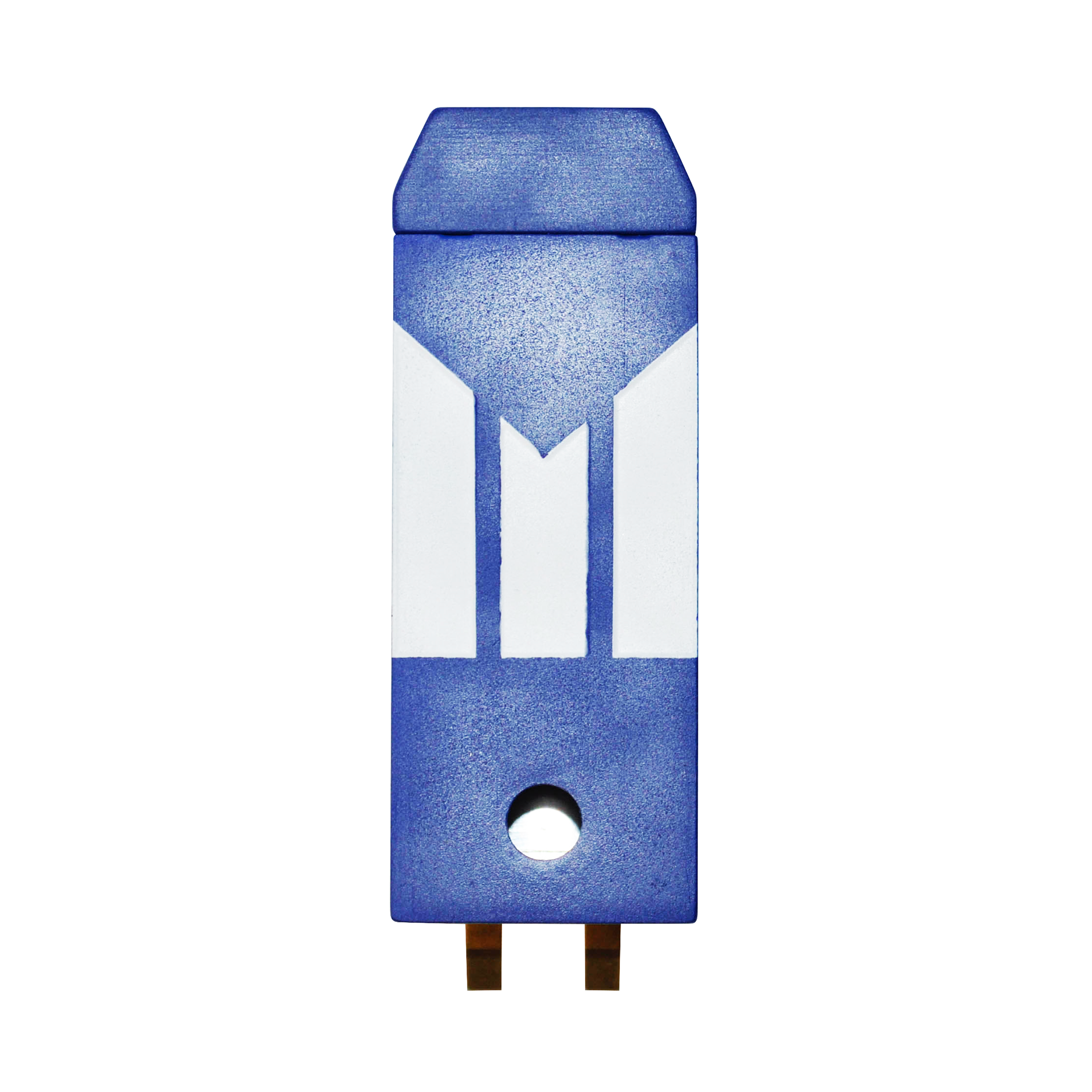
For my undergraduate capstone design project, I worked with six other mechanical engineers to design electrically actuated grippers for Mikron Corporation. In the past, Mikron has utilized pneumatic grippers in their facilities but the automation industry has seen a growing demand for electrical grippers because of the complete customization they offer. That is, the ability to control clamping speed and clamping force. Electric grippers are also advantageous in clean room environments. Pneumatics, on the other hand, can introduce unwanted moisture. We differentiated ourselves from most electric grippers by replacing the standard rack and pinion actuation system with a scotch yoke system. Our scotch yoke design can be seen below, where the gripper jaws are shown in blue.
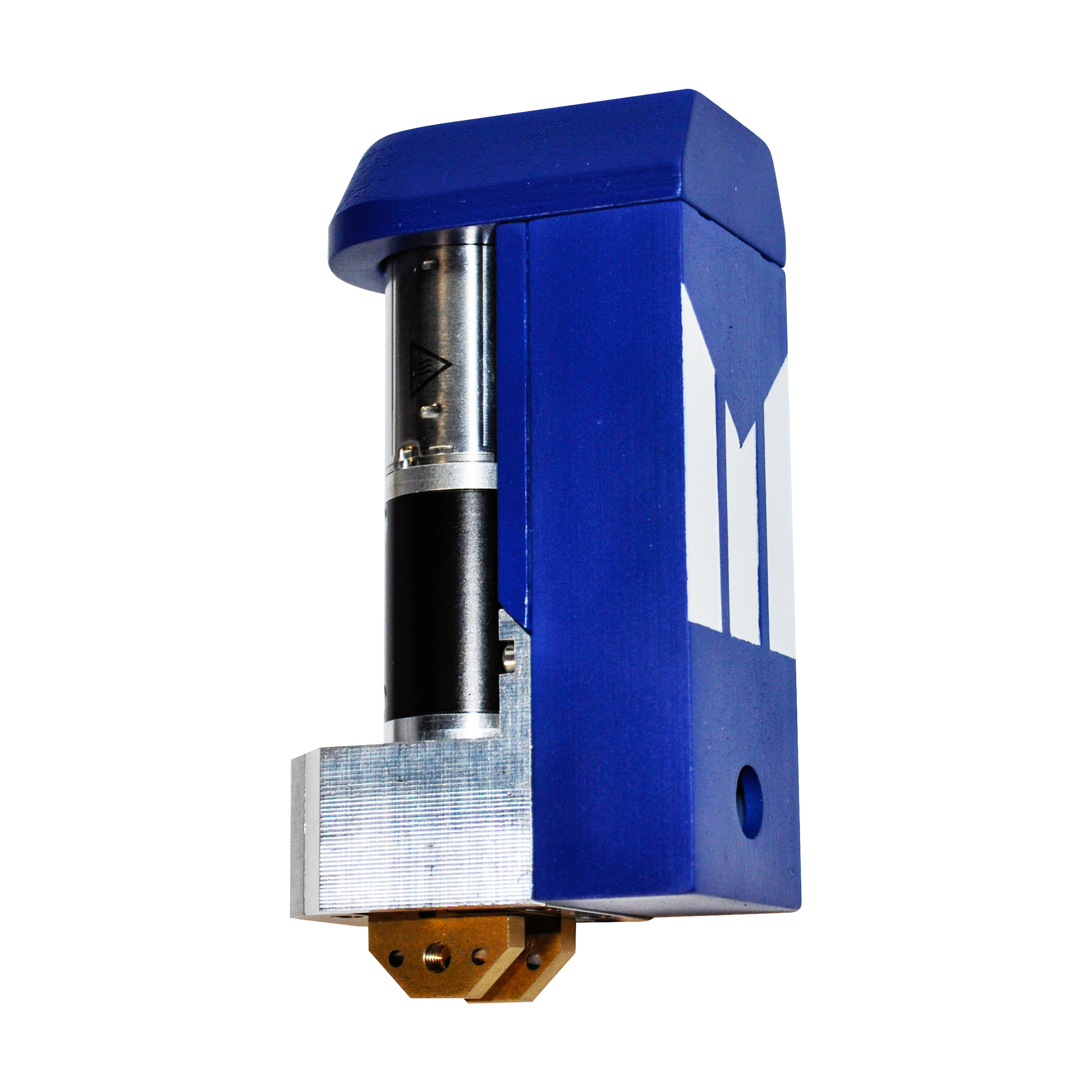
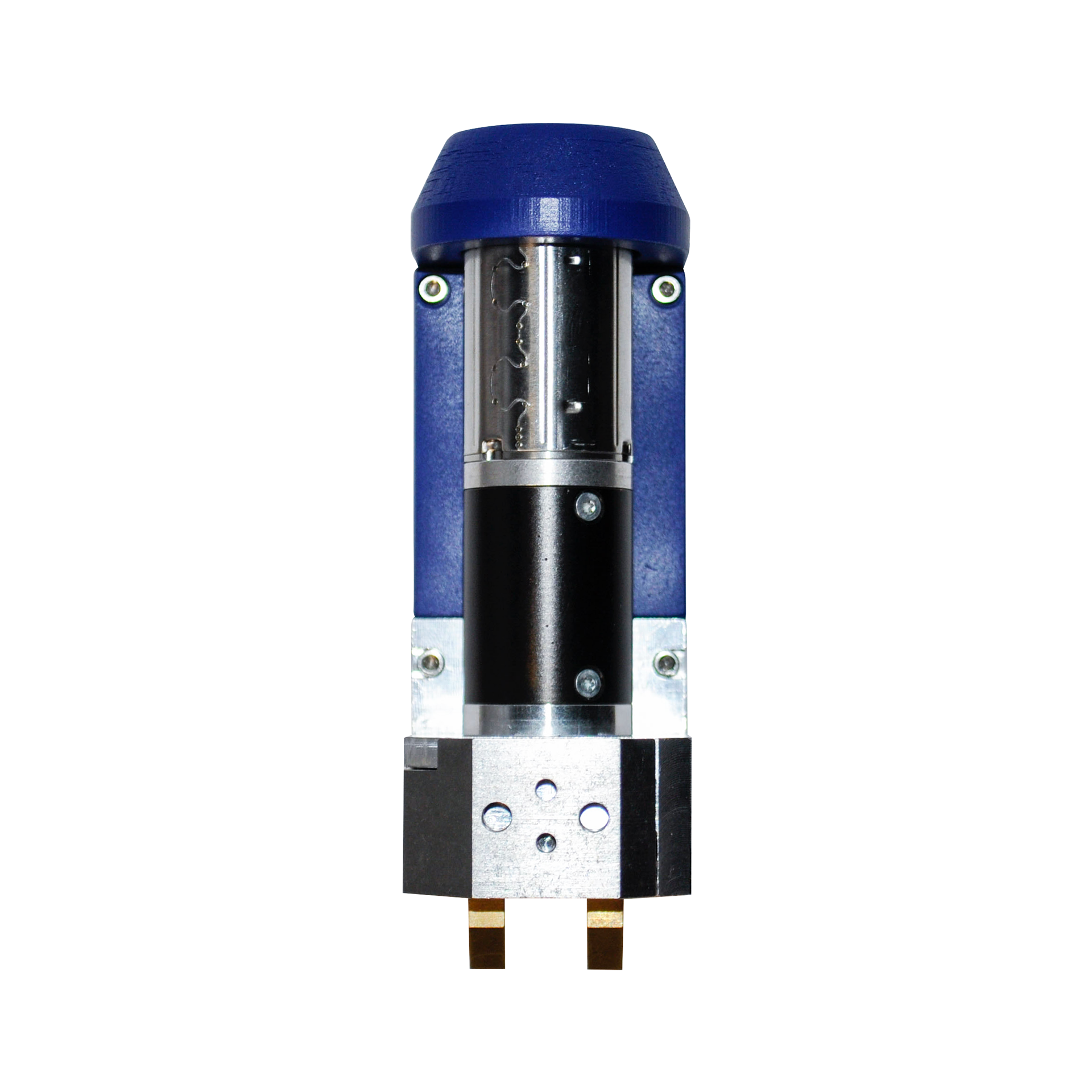
After two semesters of design, manufacturing, and testing, we created the EASY-20 Gripper, where EASY-20 stands for electrically actuated scotch yoke 2020. As can be seen, the motor is partially exposed to assist in cooling. Additionally, there are two precision mounting faces to allow for precise locating of the gripper center. There are also mounting features to support custom fingers.

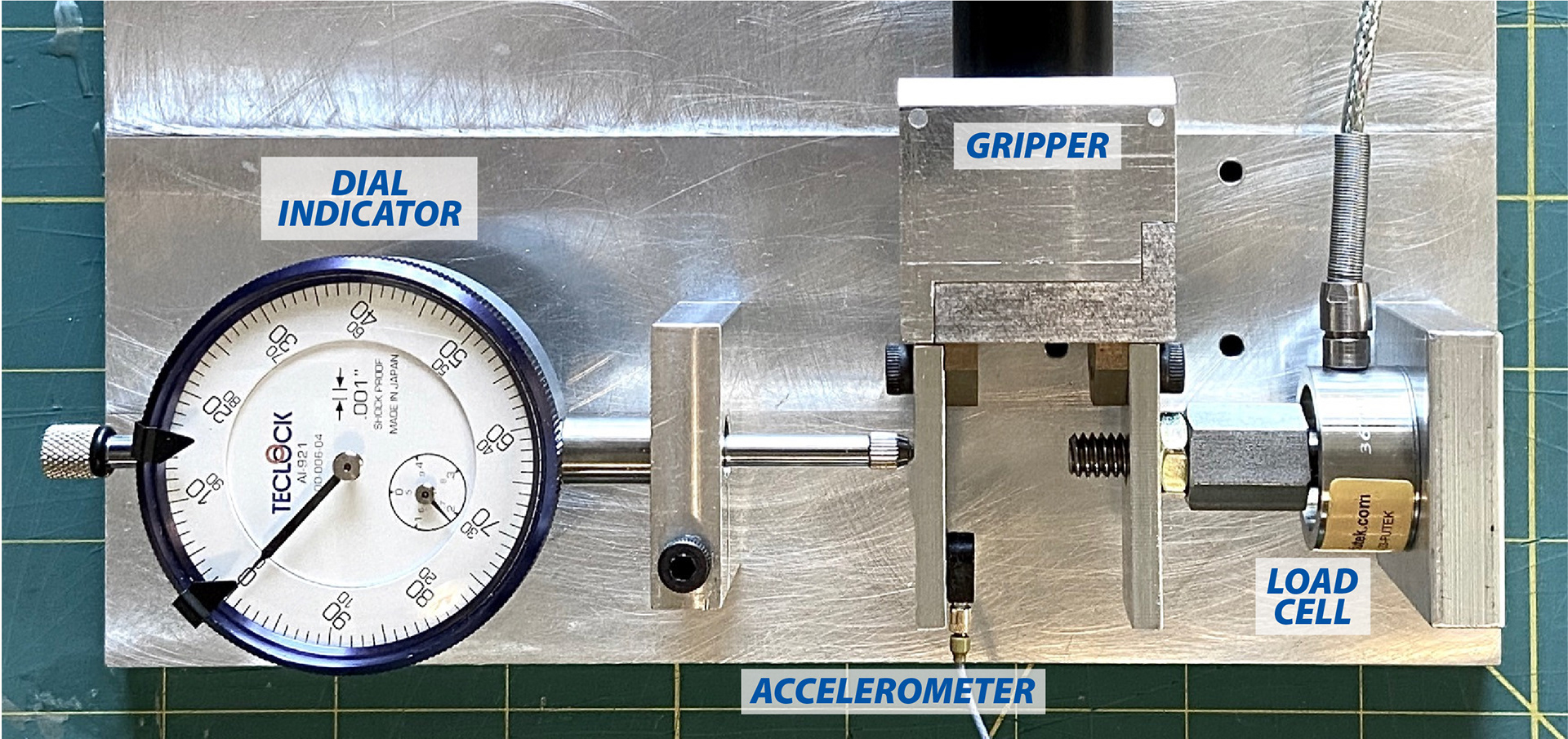
I operated as the team’s Test Engineer. This meant I was responsible for defining product specifications, designing testing jigs and procedures, conducting testing, and analyzing test results. For the EASY-20, the most important metrics to test were force, speed, and stroke. The following setup was used to test these metrics over the lifespan of the gripper.
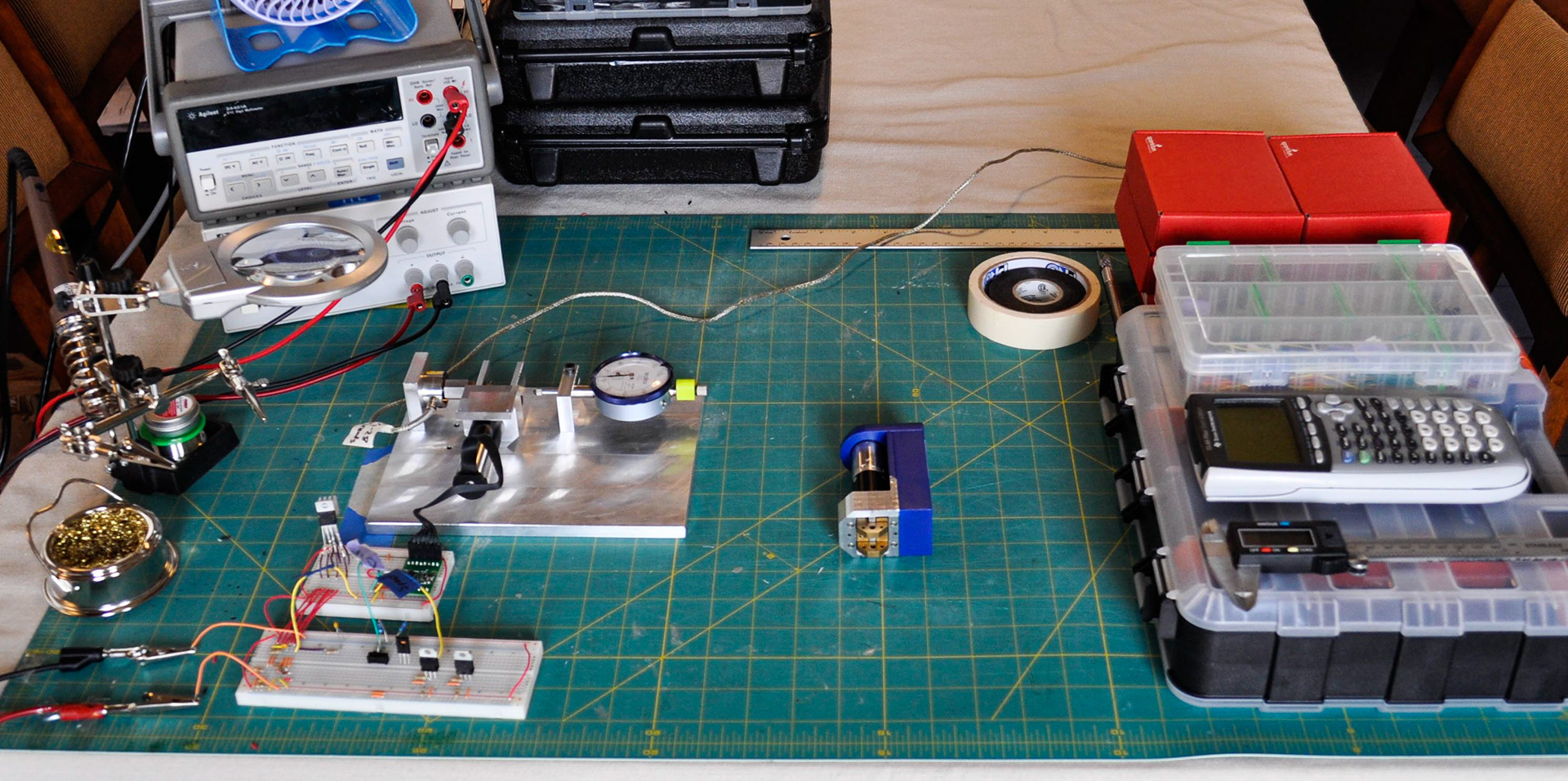
Due to the COVID-19 pandemic, all testing was conducted remotely. This meant I took full responsibility of project hardware after in-person classes were cancelled. The EASY-20 Gripper and the work I conducted from home was featured in The Colorado Engineer publication in the following story.

A total of 23,250 open/close cycles were tested, with performance measurements being made intermittently on a logarithmic scale. While testing was not being conducted, the opening and closing of the grippers were automated with an Arduino Uno. This allowed for more cycles to be conducted in a smaller duration of time. Below is an example of the data collected from the load cell.
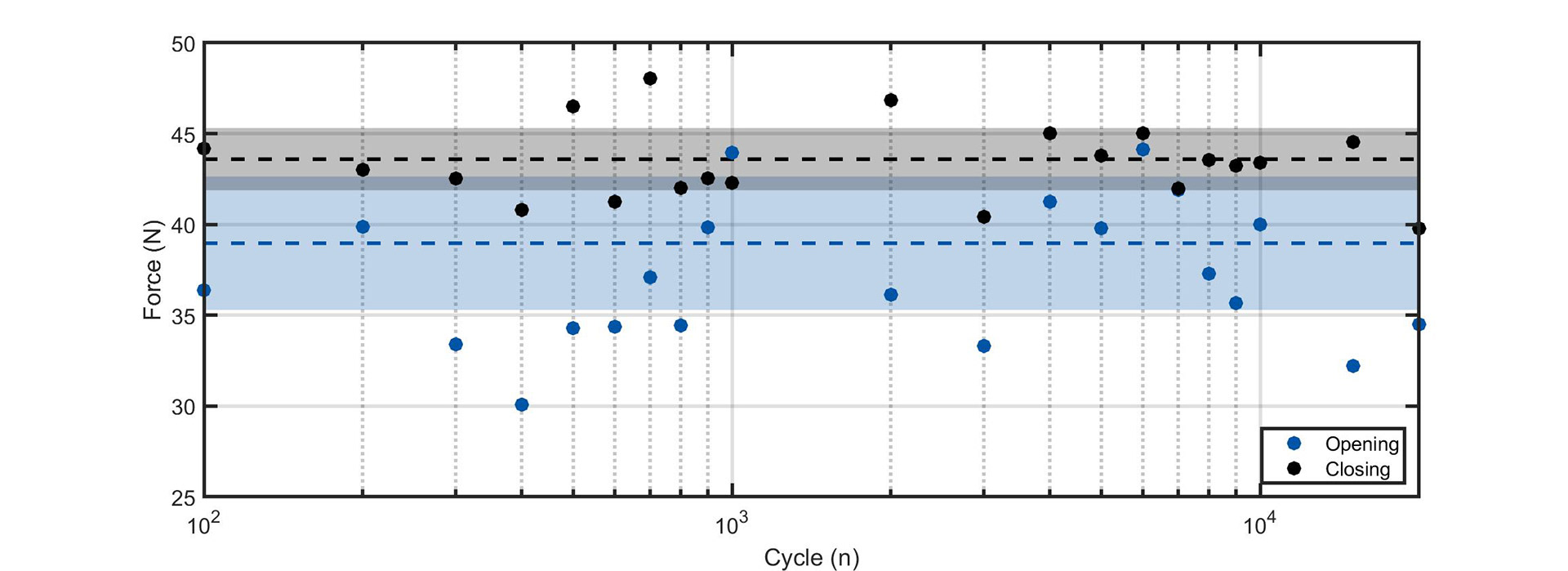
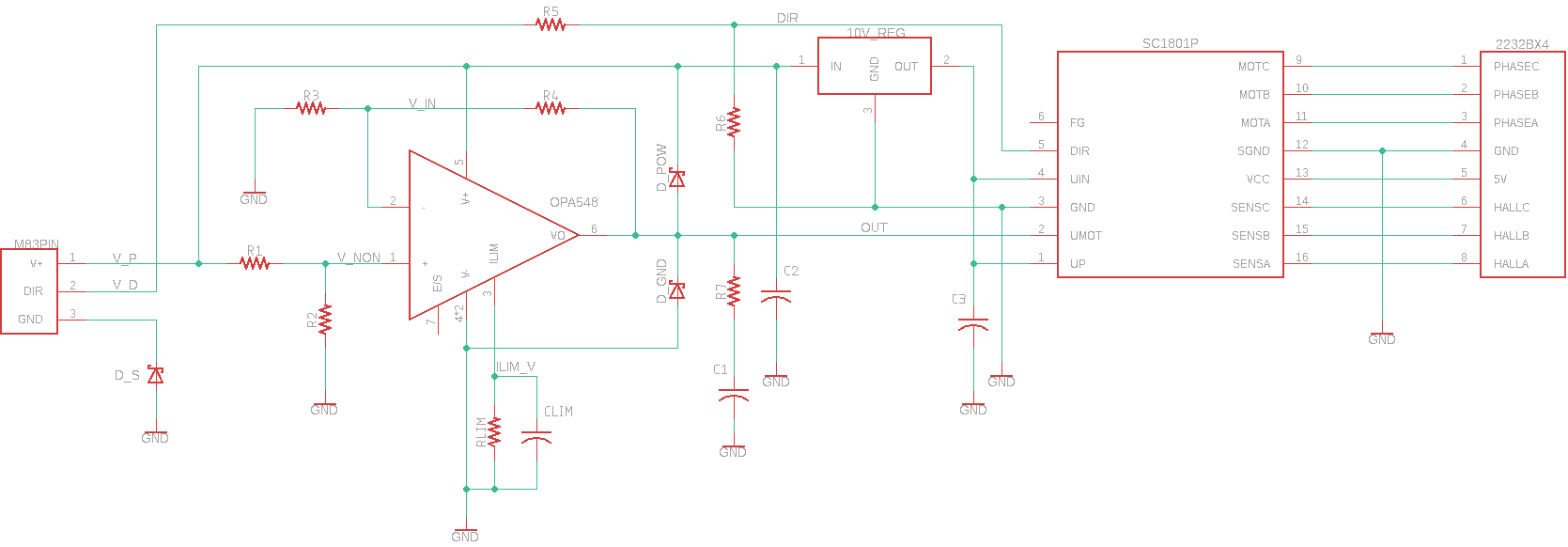
Opening force data is shown in blue and closing force data is shown in black. The dotted lines represent averages over the 23,250 cycles and the standard deviation is shown in the shaded regions. The gripper was designed to grip at 40N, which was accomplished through variable current limiting. More specifically, a current limiting operational amplifier was utilized. In additional to my role as Test Engineer, I also served as the lead electrical engineer. To create the PCB for the EASY-20, more than 15 custom libraries were created. The electrical schematic for the gripper is pictured below.
While the COVID-19 pandemic presented significant barriers, this project was an overall success. Our team created a gripper that clamps at 40N with a closing speed of less than 50ms, faster and stronger than most competitors. Additionally, the EASY-20 had a stroke repeatability of 0.013mm, better than both electrical and pneumatic competitors. This can, in part, be attributed to the utilization of the scotch yoke system. More information on this project, including a whitepaper and video can be found in the following link.